ご注文は缶ですか??の第二回解説記事
今回は回路についてです。
まず、メイン基板の回路図はこちらになります。
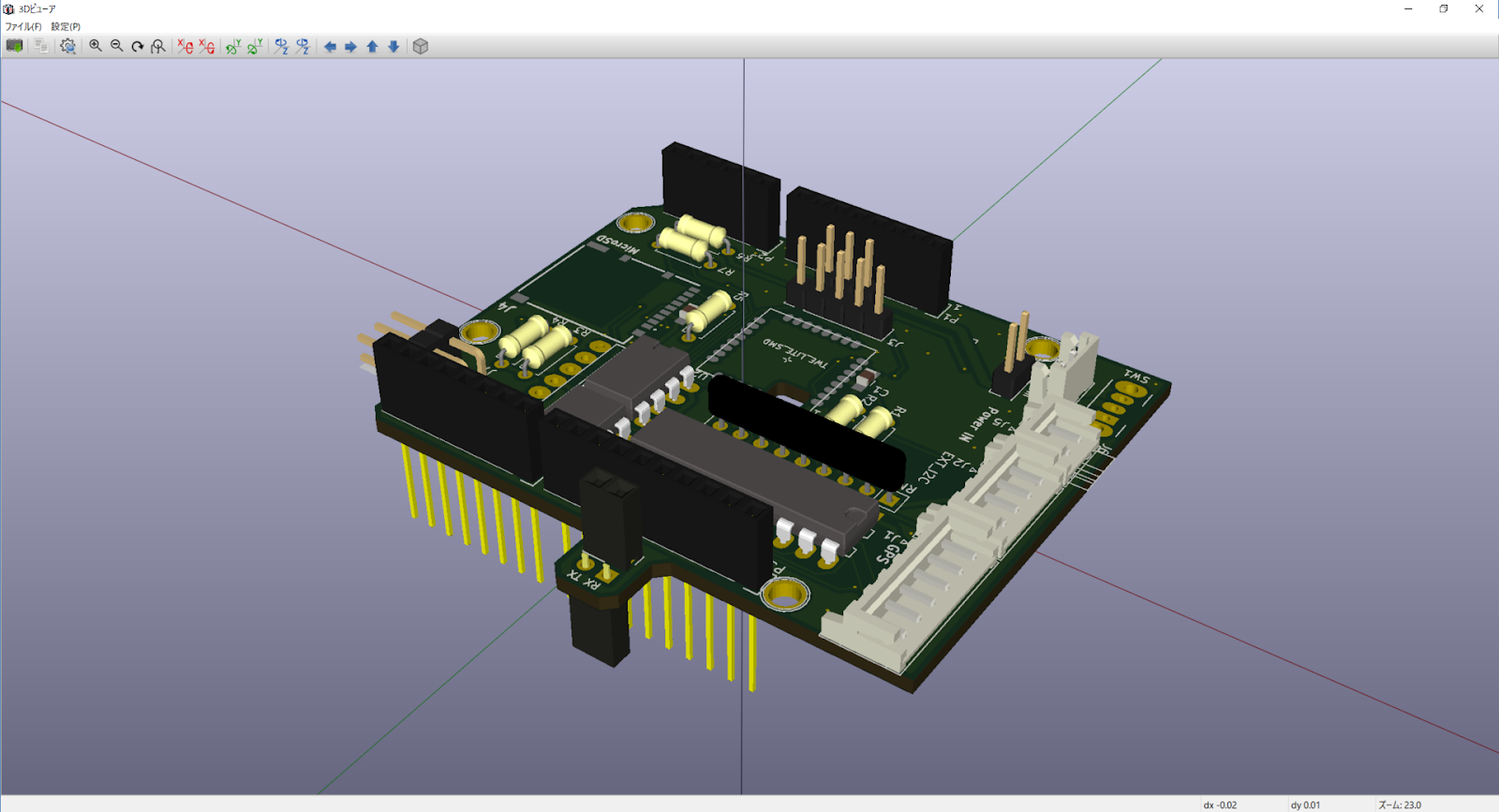
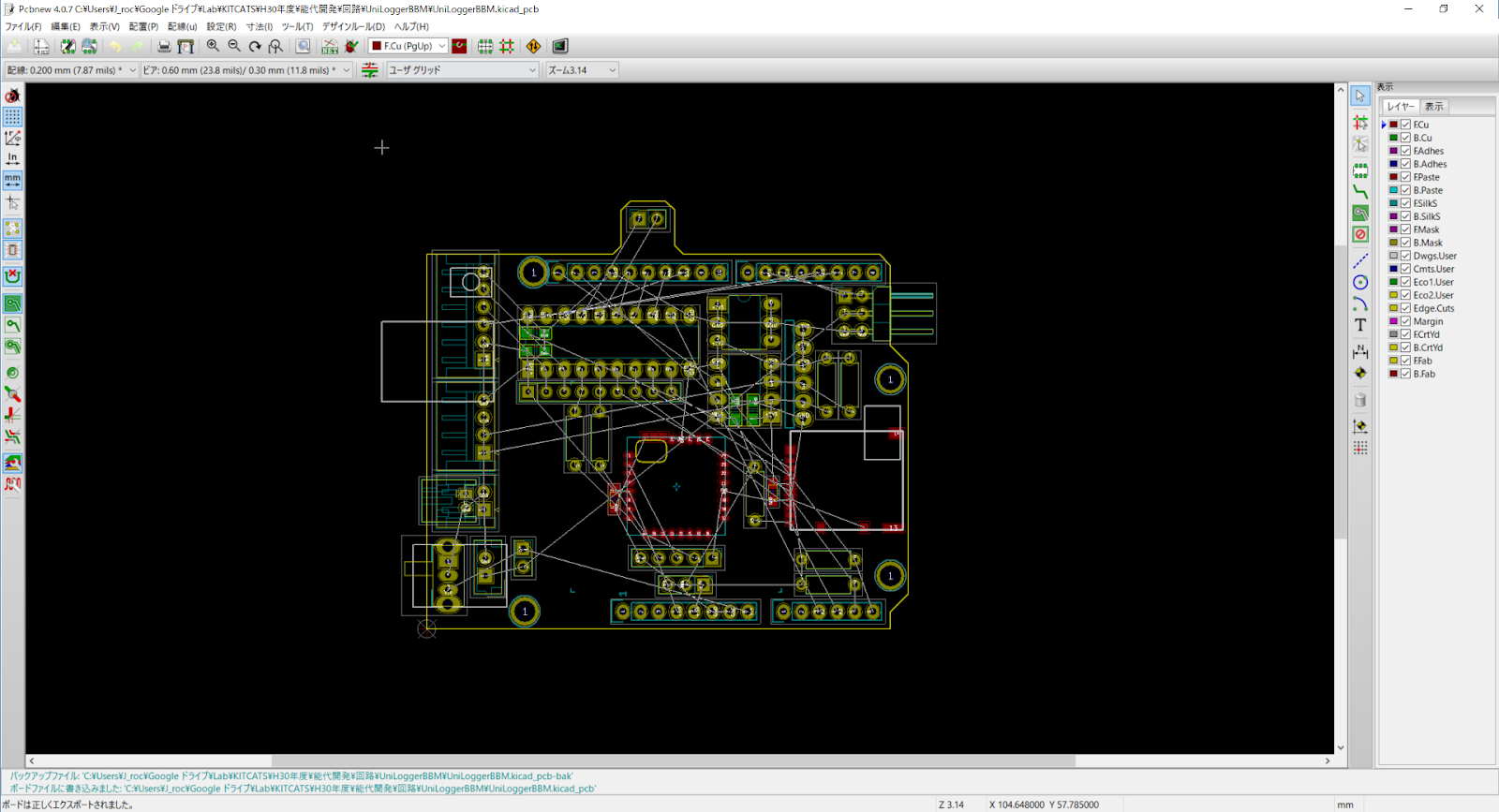
プリント基板
プリント基板は、KiCadで設計しています。
ミッション基板や、付属基板を面付けして、elecrow(
http://www.elecrow.com/)に発注しています。
基本的に、部品は秋月電子通商(
http://akizukidenshi.com/catalog/default.aspx)で手に入るものを使用しています。
以降、部品名に秋月のリンク張っていきます。
電源部
第一缶ですでに出しましたが、電源はLiPo 2セル 7.4V 450mAhです。モーターもロジックも同じものから取り出しています。
ロジック用電源は、LiPoからレギュレータICの
NJM2863F33を使って3.3Vを作っています。
3mm四方のICのくせに150mAもはき出せるんで、今回の用途では十分(消費電力数十ミリアンペア)だと考えて採用しました。
レギュレータICの前に置いた
LT6106CS5で電流値を電圧値に変換してます。
これと、LiPoの電圧を分圧したものを
NJM2732Mで組んだボルテージフォロアでインピーダンス変換して、マイコンのADコンバータに入れています。
ADコンバータの基準電圧として
NJM2825Fを使用して、1.2Vを作っています。
D1は電源投入確認用のチップLEDで、FM(フライトモデル、大会に出したモデル)は
青LEDです。
メインマイコン
メインマイコンには、
ATmega1284P-AUを使っています。
選定理由は、ハードウエアのUARTが2つついていて、GPSとPCの接続に便利だったからです。
AVRを選んだ理由は、宗教戦争()になりかねないのでやめましょう(だって使いやすいんだもん
動作周波数は、3.3Vで動作保証されている最大の12MHzを採用しました。
三角関数とか少し重めの処理をさせるだろうと思って採用したんだけれど、8MHzぐらいで十分だったかもしれないです。8MHzなら内部発振使えて、部品数減らして信頼性を向上させれたのだけれども。
ニクロム線ドライバ
ニクロム線は、数A流します。(モーターより消費電流大きい)
そのため、スイッチング素子にオン抵抗の小さいMOS-FETを使用しています。
FDS4935は、ON抵抗が19mΩのPchのMOS-FETが2個入っていて、実装面積が小さくでき、都合がよかったので採用しています。(しっぽ展開用とパラシュート切断用)
Nchのほうが安価でON抵抗の小さい素子があるのですが、Pchにした理由はハイサイドでスイッチングしたかったからだったはずです。
(数ヶ月前の設計なんで、あまり覚えてない。たぶん、構体をGNDに落としたかったから、じゃないかな)
PchのMOS-FETのゲートを駆動するためにNchMOS-FETの
2N7002DW(こちらもパッケージに2個入り)を使ってます。
この素子が、あほみたいに小さくて、手実装やめようかと思うぐらいでした。
0.65mmピッチなのはまだいいとして、6ピンしかないから、1番ピンがどこにあるの?状態になるし。(一応、点対称に素子が入っているんで、逆に実装しても動くけど・・・)周りの抵抗(1608サイズ)の方がむしろ大きいし、EM(エンジニアリングモデル、開発用)ではフットプリント間違えて、ウレタン線で修正しないと行けないし。もうっ!って感じでした。
モータードライバ
モータドライバは、
BD6222HFP-TRを採用しました。
10V以上の耐圧性能を持っていて、2A程度を駆動できるぐらい(去年の教訓、電流容量が足りないと、ちょっとしたことでストールする)の電流駆動性能を持っているまぁまぁ小さな、できるならば表面実装のモータドライバを選んでみたら、これになりました。
ちなみに、タミヤのミニモータは3V定格ですが、7.4Vをそのまま突っ込んでます。PWMで手加減とかほぼせずに(曲がるときに片方をPWMで少し速度落とす程度)
今のところ、煙噴いたりしていないので、たぶん次の大会もこれで行こうかなと思っています。小さくてパワーがあるし。
GPSモジュール
GPSモジュールは、
GMS7-CR6です。
小型のモジュールだったので採用しています。開けた場所なら50cmぐらいのところまでこれで誘導できます。
今は売り切れだし、みちびき対応の方が小さいので、次の大会では、基板を起こしてこれを載せようかなと思っています。
EEPROM
EEPROMは、1Mbit記録できる
AT24C1024Bを使っています。
小さい表面実装部品(
25LC1024T-I/MF)もありますが、ソケットで交換できるのと、さすがにDFNパッケージは手実装できないので、DIP品使っています。
センサー類
センサーとして、距離センサ(
SRF02)と方位センサ(
HMC5883L)をしっぽに載せています。
距離センサは地面との距離を測って、着地の検知に、方位センサはGPSと組み合わせて誘導するのに使います。
方位センサの高い方を使っているのは、1年前のカンサットで使っていたのを流用しているからです。
コネクタ
コネクタは、書き込みとPCとのUART、フライトピンに
ピンヘッダ、ミッションとの接続に1列の
丸ICソケット、(相方は、
丸ピンIC連結ソケット)、残りは、JSTの
EHコネクタを使用しています。